Welcome!
I'm a computer vision scientist at ChemImage Corporation. At ChemImage, I develop machine learning and computer vision algorithms that can solve challenging medical imaging problems. Prior to this, I graduated with a PhD degree in Electrical and Computer Engineering (ECE) department at Purdue University, West Lafayette in 2020. There, I worked under the guidance of Prof. Edward Delp and Prof. Zygmunt Pizlo. Before joining the PhD program at Purdue, I obtained my master's (MS) degree in ECE from University of Arizona, Tucson and a bachelor's (B.Tech) degree in Electronics and Communication from Cochin University, India. Through this website, I intend to provide visitors with an introduction to my research work. Here, you can also find information on some of the earlier projects that I worked on.
Research
The focus of my PhD work was on understanding the role of priors in three-dimensional (3D) visual perception and in using this information to develop better computer vision algorithms. 3D vision is an ill-posed inverse problem. The formation of the 2D image of a 3D shape/scene is the forward problem, and inferring the 3D shape/scene from the image is the inverse problem. The ill-posedness is related to the fact that any given 2D image is consistent with infinitely many 3D interpretations (see this demo for an illustration of the ill-posedness). In order to produce a unique and ideally correct interpretation, one has to impose constraints (aka priors) on the family of possible interpretations.
As far as I see, all a priori statements in physics have their origin in symmetry- Hermann Weyl
Symmetry, planarity, compactness etc., are some priors used by the visual system to deal with the ill-posedness of the problem. In my work, I attempt to better understand the role of these priors through psychophysical experiments. I'm also interested in finding ways to employ such priors to improve computer vision algorithms. Specifically, I explore the role of reflection symmetry in single image reconstruction and the role of translational symmetry in semantic labelling of 3D point clouds. A brief description of these projects (along with some demonstrations and links to the corresponding papers) are given below in projects section.
Projects
Psychophysics to Study the Priors Employed by the Visual System
Prior studies have found that, the perception of symmetric abstract polyhedral shapes, can be well modeled using priors likesymmetry compactness and binocular depth order information. Through this study, we show that these priors can be used to model asymmetrical shapes obtained from affine distortions of symmetric shapes. In this study, stimuli were generated using the game engine Unity (known commonly as Unity3D). To display the stimuli, we used Oculus Rift, a virtual reality (VR) head-mounted display. The experiment shows that the perception of symmetrical shapes is closer to veridical in comparison to asymmetrical shapes. Metrics to measure asymmetry of abstract polyhedral shapes and to measure shape dissimilarity between two polyhedral shapes are introduced. A control experiment which proves the goodness of the model is also presented. Click on the "Results" link below to see all the shapes used in the experiment, along with the user reconstructed shapes and the model. The links to an online version of the experiment and demo of the three parameter family are also provided below. In the the 3-parameter family demo, after modifying the shape (using the three parameters), go back to the original view (i.e., click on original view and then play/pause) to see the priors employed by your own visual system in action.
Links
TAGS
3D Visual Perception Psychophysics Symmetry Priors Virtual Reality Oculus C# Unity Three.js Monocular Binocular
Decomposing a Point Cloud
Decomposing a point cloud into its components and extracting curve skeletons from point clouds are two related problems. Decomposition of a shape into its components is often obtained as a byproduct of skeleton extraction. In this work, we propose to extract curve skeletons, from unorganized point clouds, by decomposing the object into its parts, identifying part skeletons and then linking these part skeletons together to obtain the complete skeleton. We believe it is the most natural way to extract skeletons in the sense that this would be the way a human would approach the problem. Our parts are generalized cylinders (GCs). Since, the axis of a GC is an integral part of its definition, the parts have natural skeletal representations. We use translational symmetry, the fundamental property of GCs, to extract parts from point clouds. We demonstrate how this method can handle a large variety of shapes. We compare our method with state of the art methods and show how a part based approach can deal with some of the limitations of other methods. We present an improved version of an existing point set registration algorithm and demonstrate its utility in extracting parts from point clouds. We also show how this method can be used to extract skeletons from and identify parts of noisy point clouds. A part based approach also provides a natural and intuitive interface for user interaction. We demonstrate the ease with which mistakes, if any, can be fixed with minimal user interaction with the help of a graphical user interface.
Links
TAGS
Curve Skeleton Point Cloud Decomposition Point Set Registration Translational Symmetry Generalized Cylinders Expectation Maximization



3D Shape Reconstruction from a Single Image
3D shape recovery from a single camera image is an illposed inverse problem which must be solved by using a priori constraints (a.k.a priors). We use symmetry and planarity constraints to recover 3D shapes from a single view. In many ways, symmetry and planarity represent the simplicity of a 3D object, and by applying these constraints we attempt to reconstruct a simple 3D shape that can explain the 2D image. Once we assume that the object to be reconstructed is symmetric, all that is left to do is: (i) estimate the plane of symmetry, and (ii) establish the symmetry correspondence between the various parts of the object. The edge map of the image of an object serves as a representation of its 2D shape; establishing symmetry correspondence means identifying pairs of symmetric curves in the edge map. In this work, it is assumed that the vanishing point, which establishes the symmetry plane up to a scale factor, is known. In addition, it is also assume that the focal length and the direction of gravity are known. Long smooth curves are extracted from the edge map by solving the shortest (least-cost) path problem, where the cost function penalizes large interpolations and large turning angles. Optimal curve matches are then found that minimize the number of planes required to approximate the final 3D reconstruction. This optimization problem is framed as a binary integer program and solved using the Gurobi solver.
Links
TAGS
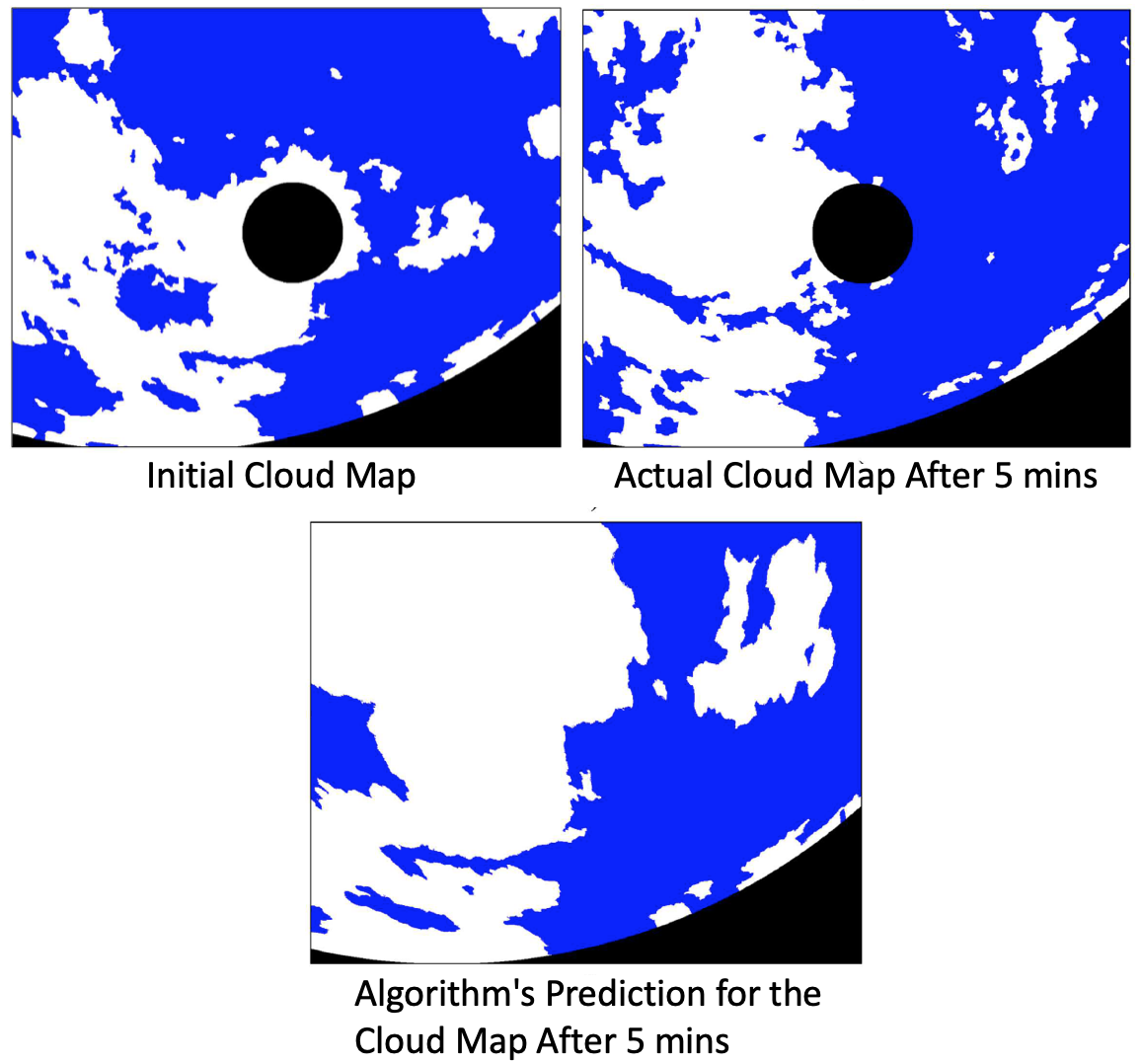
Forecasting Solar Power Intermittency using Ground-based Sky Imaging
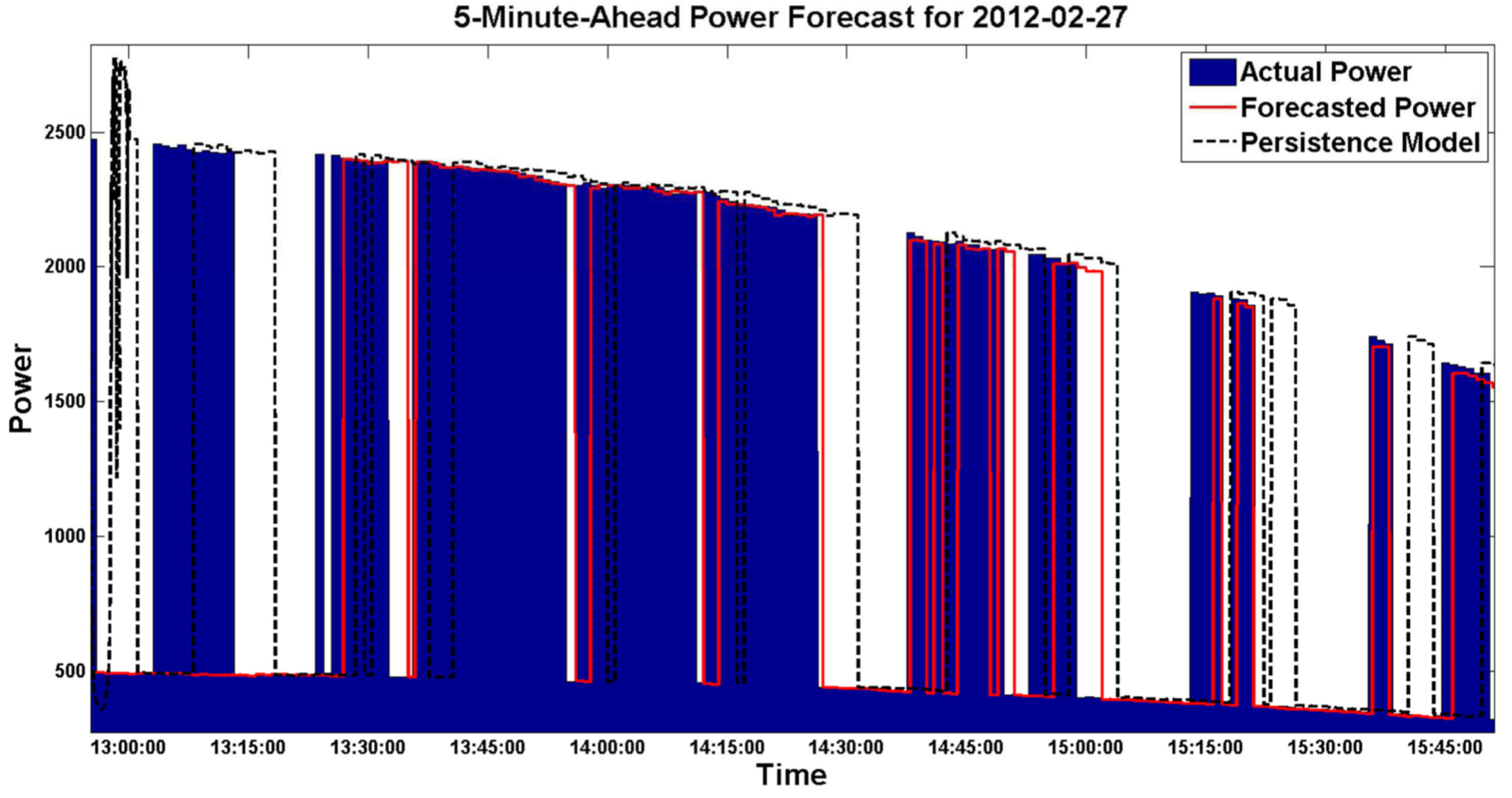
Solar power utilization at the utility-scale is one of the grand challenges identified by the National Science Foundation. The intermittent output of solar power plants due to passing clouds and nighttime is a major problem. Intermittency limits the adoption of solar power by utility companies and industry because they require reliable, predictable power generation. Methods used to counter the problem of intermittency, such as interconnecting geographically dispersed photovoltaic (PV) systems, using dispatchable spinning reserves, energy storage and smart grids require accurate forecasting of PV power output for safe and efficient operation. For instance, utility operators require a ten-minute warning to bring spinning reserves online. Forecasting at multiple timescales is valuable for utility operators and plant owners. Day-ahead forecasts are needed to better determine pricing in the energy market. Hour-ahead and shorter time-scale forecasts are valuable for electric grid operators to schedule spinning reserves. Image analysis algorithms applied to images acquired using ground-based sky imaging (GBSI) systems have shown promise in making intra-hour power forecasts, but typically have limited reliability. This thesis developed novel image analysis techniques to produce reliable intra-hour power forecasts. A GBSI system was set up at the Tucson Electric Power solar power test yard, which unlike most other such systems tracks the sun. The various modules involved in producing a power forecast, namely, cloud detection, motion estimation and cloud advection, were dvevloped. A new feature for enhancing the contrast between cloud and sky to aid cloud detection is proposed. A novel conditional random field based method, which attains a very high accuracy for cloud detection, was develped. The utility of using the GBSI set up for dealing with intermittency was demonstrated by the results for the prediction of solar power output.
Links
TAGS
Efficient Soft Shadow Rendering
As part of the coursework in the Computer Graphics course , the paper, GEARS: A General and Efficient Algorithm for Rendering Shadows, was implemented. The entire rendering pipeline was implemented from scratch in C++. The images to be rendered are created as instances of a framebuffer object (which inherit from Qwidget object). The animation on the left shows the transformation of soft shadows into hard shadows as the light source shrinks to a point and the one on the right shows the movement of the soft shadows corresponding to the motion of the light source.
TAGS
Contact
To get in touch, please email me or send me a message on LinkedIn. For more ways to reach me, please refer to my CV.